

Evighetsmaskiner
ABU Garcia tillverkar fiskerullar i Svängsta. Produkterna är finmekaniska, hög kvalitet och finish krävs på alla delar. ”Evighetsskruven” tillverkas i ”evighetssvarven” vars motorstyrning gjorts av Calmon.
Läs mer
Fler utmaningar vi löst
Genom åren har vi tagit oss an och löst många utmaningar. Högpresterande stegmotorstyrningar och andra motorstyrningar. Kraftelektronik, elsäkerhet och EMC. Industriell elektronik ofta med sensorsystem. Vi hjälper dig.
Läs merOptimering
Många motorstyrningar har stor outnyttjad potential. Utan rörelseanalys eller liknande metoder är det mycket svårt att till fullo utnyttja potentialen i motor, drivsteg, mekanik och programvara. Genom optimeringar, ofta endast i mjukvaran, kan snabbare rörelser, bättre positionering, högre tillförlitlighet, lägre energiförbrukning och mindre ljud uppnås. Ofta leder optimering med rörelseanalys till att alla ovanstående egenskaper förbättras samtidigt. Optimeringar leder till kostnadsbesparingar när mindre motor och drivsteg kan användas. Test och optimeringar redan under systemkonstruktionen är ofta mycket kostnadseffektiva.
Snabba motorstyrningar
Snabba rörelser kräver snabb start och stopp, hög acceleration och hög topphastighet. Alla dessa faktorer gör att mekaniken utsätts för höga moment och krafter, svikt samt glapp i chassi, axlar och remmar kan inte längre försummas. Det blir viktigt att undvika att trigga systemets resonanser, dessa har ofta låg frekvens och tar därför lång tid att klinga ut. Genom rörelseanalys av det mekaniska systemet kan de dominerande felkällorna identifieras och åtgärdas. Alternativt kan rörelsemönster och regulatorer justeras så att de bättre hanterar det mekaniska systemets egenskaper.
Noggrann positionering
En kodskiva eller magnetgivare med 5000 pulsers upplösning levererar inte automatiskt denna noggrannhet. Om tiden mellan pulser används för att mäta hastigheten ökar hastighetsfelet när upplösning ökar.
Att konstruera bort glapp och hysteres i växel och mekanik kan vara kostsamt. Att låta mjukvaran hantera detta är möjligt men förlänger rörelsernas tid.
Att välja rätt motor, lagringar, utväxling, styrning och eventuell återkoppling är svårt när noggrann positionering krävs. Varken noggrannhet eller upplösning kan beräknas så enkelt som Utväxling * mikrosteg per helsteg * antal helsteg per varv. Calmon hjälper er med analyser, beräkningar, mätningar och råd när noggrann positionering är viktigt.

Hög hastighet – Låg och jämn hastighet
Att samtidigt både kunna göra snabba förflyttningar och krypköra med jämn hastighet ställer krav på alla motordriftens delar. Kuggmoment och olinjäriteter i motorn måste undvikas. Kast, varierande friktion och glapp i transmissionen måste minimeras. Drivsteget får inte ge distorsion av motorströmar. Mjukvaran får inte ha problem med overflow eller förlust av upplösning. Fel i återkoppling måste vara försumbara. Mätningar på motor i kombination med rörelseanalys och realtidsvisning är mycket effektiva metoder att uppnå både hög och jämn låg hastighet.
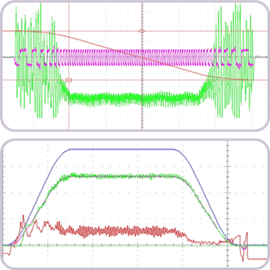
Bilden visar inverkan av motor och drivsteg vid låg hastighet, grön är strömmen i en lindning, blå är hastigheten. På samtliga bilder är medelhastigheten 1,25 varv per sekund (streckad blå linje). Övre bilden en billig trefasmotor och en motorstyrning från Ebay, fint sinusformad ström men hastighetsripplet är mycket stort! Motorn stannar nästan ibland och topphastigheten är nästan dubbla medelvärdet. Mitten, en motor med högre kvalitet, drivsteg Ebay, mindre hastighetsrippel men inte bra. Nederst samma motor som mitten men ett bättre drivsteg. Trots att strömmen är mindre sinusformad och mikrostegningen mycket grövre går motorn betydligt jämnare. Det bör noteras att energin i ripplet är proportionell mot hastighetsripplet i kvadrat! Vid ännu lägre hastigheter, vid resonanser och stor belastning kan skillnaderna vara mycket större än i detta exempel.
Ljud och vibrationer
Ljud och vibrationer orsakas i grunden av samma saker som orsakar ojämn rörelse vid låga hastigheter. Skillnaden är att rörelsesystemets resonanser förstärker felen på vissa hastigheter. På höga hastigheter kan tröghetsmassorna hjälpa till att filtrera bort vibrationer. Dämpande upphängning av motor och växel samt användning av dämpmaterial i chassi och inkapsling kan också användas. Justering av drivstegets inställningar och mjukvarans stegtider och regulatorinställningar har ofta mycket stor inverkan. Rörelseanalys används för att systematiskt mäta hur olika åtgärder påverkar svängningarnas amplitud och frekvens.
Låg kostnad
Genom optimering av rörelsemönster, insvängningsförlopp och noggrannhet kan motor och andra ingående komponeter utnyttjas effektivare. Verkningsgrad och prestanda förbättras trots att mindre och billigare motor används. Ofta innebär mindre motor också mindre drivsteg, ljud och vibrationer. För stegmotorsystem är en för stor och dåligt utnyttjad motor ofta orsaken till onödiga ljud och vibrationer. Den goda tanken med en stor motor och extra marginal blev både dyr och dålig.